
随着我们对异步电机和同步电机有了初步的感性认识,我们将从控制策略层面一层一层地观察电机是如何被控制的。主要分为两部分。部分是电机的开环控制,没有任何反馈,电流环反馈,速度环反馈。第二部分是电机的闭环控制,包括电流环反馈和速度环反馈,特别是给电机一个指定的速度,看电机如何反应,建立速度的过程。
需要以下工具和认知:
1.Matlab软件,最好是R2013a版本
2.Simulink仿真单元,需要熟悉各个功能块。
3.了解SVPWM的机理和原理,尤其是各扇区和伏秒平衡。
4.对三相逆变器的初步认知。
5.各种变换,包括帕克和克拉克变换和逆变换。
6.PI调整电流内环的开环传递函数,一般用空间状态对小信号建模。
7.环路稳定机制、幅频特性和相频特性等。
8.各种极点和零点的特性。左半平面极点、右半平面零点和初始极点等特征。
部分:开环控制
1.建立SVPWM模型,如下图1所示。主要有四个子模型:
一、扇区判断子模型
b、矢量动作时间子模型
c、开关动作时间子模型
D.PWM波形生成子模型。
从图1可以看出,这个SVPWM模型的输入是左上接口:abo静态坐标系的矢量,而最右边的接口是输出接口,是6个互补的PWM信号。
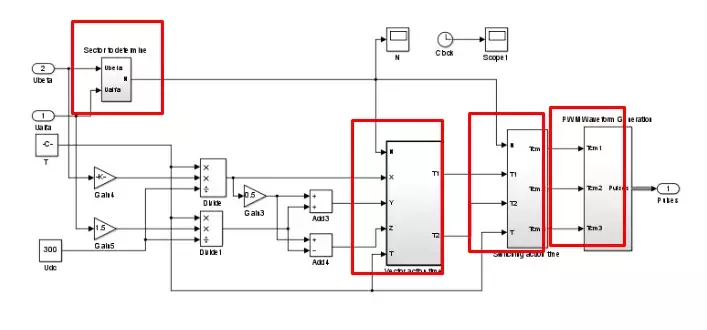
图1 SVPWM模型
下图是板块判断的子模型。为什么需要板块判断?因为SVPWM有六个扇区,对于任何给定值,都需要确定这个值位于哪个扇区,每个扇区以不同的顺序控制三相逆变电路中的六个开关。从图中可以看出,板块判断的子模型无非是简单的逻辑运算。
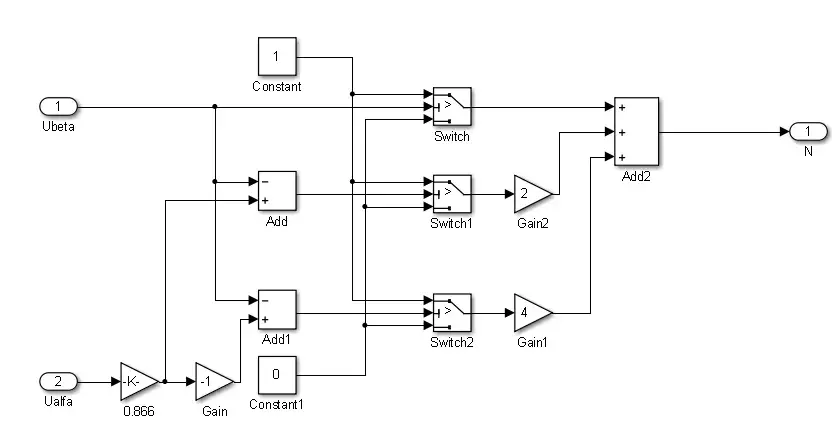
图2扇区判断子模型
图3显示了向量作用时间的子模型。判断扇区后,需要用伏秒平衡来合成给定值。有许多合成机制,包括零矢量的选择。
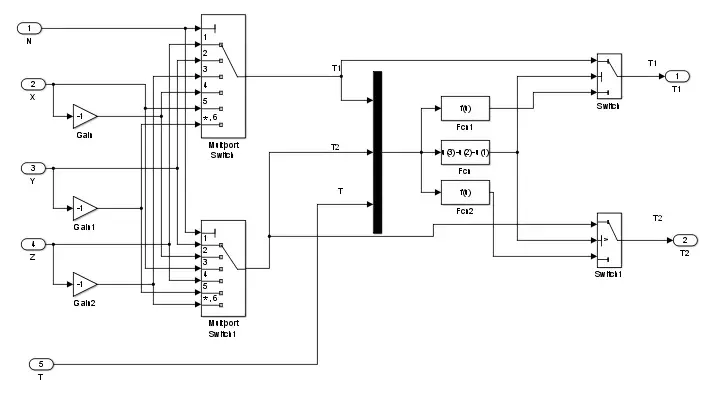
图3矢量动作时间子模型
图4是开关动作时间的子模型。如前所述,伏秒平衡的应用。
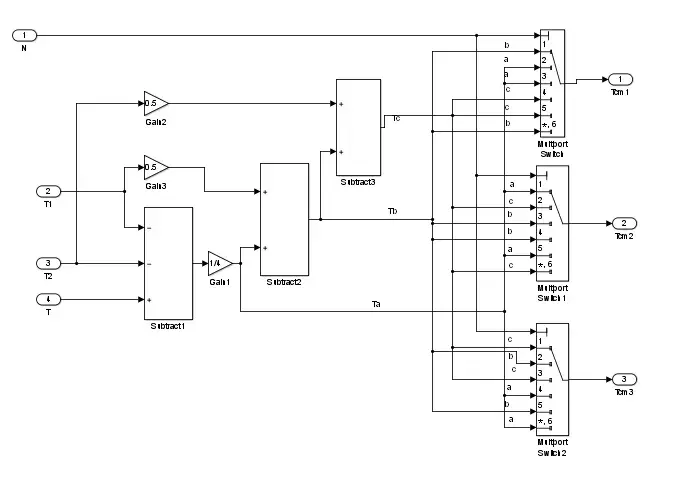
图4开关动作时间子模型
图5是PWM波形生成子模型。您可以在图5的左上角看到三角波模式。这是载波,其频率远高于给定频率。图5右侧是PWM脉冲波的输出接口,可以直接接三相逆变电路。
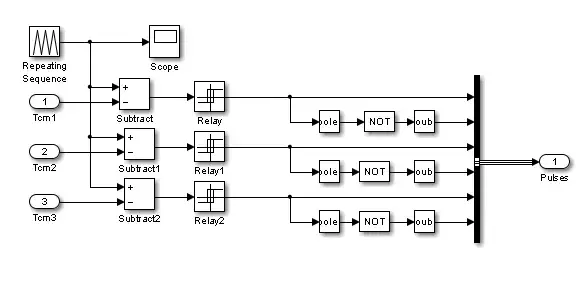
图5 PWM波形产生子模型
好了,SVPWM模型建立后,我们需要验证它的功能是否正确。SVPWM模型的输入接口由abo静态坐标系的矢量激励,如下图6所示。这里的激励信号是ab两个矢量信号。A和B矢量相差90 ,幅度相同,如图7所示。SVPWM模型的输出信号如下图8所示。从图8可以看出,在存在外部激励信号的情况下,SVPMW模型的功能是正确的。
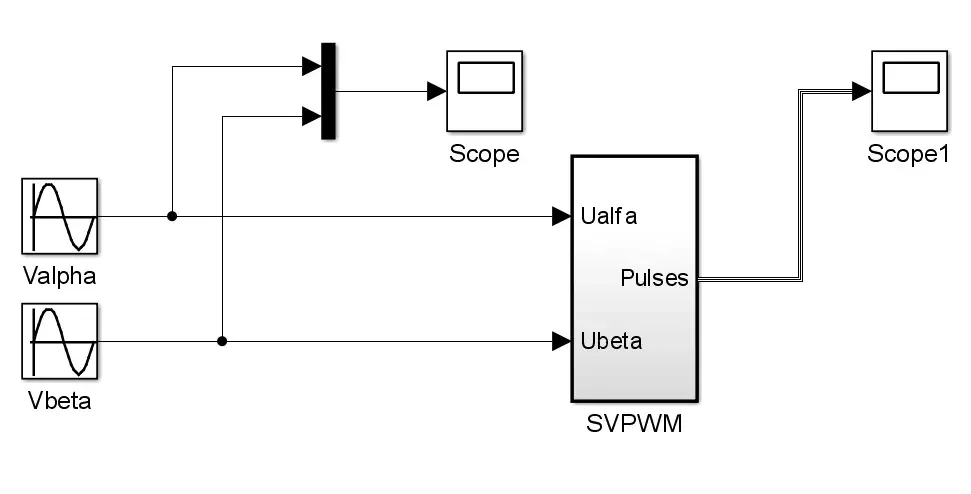
图6: SVPWM输入激励源
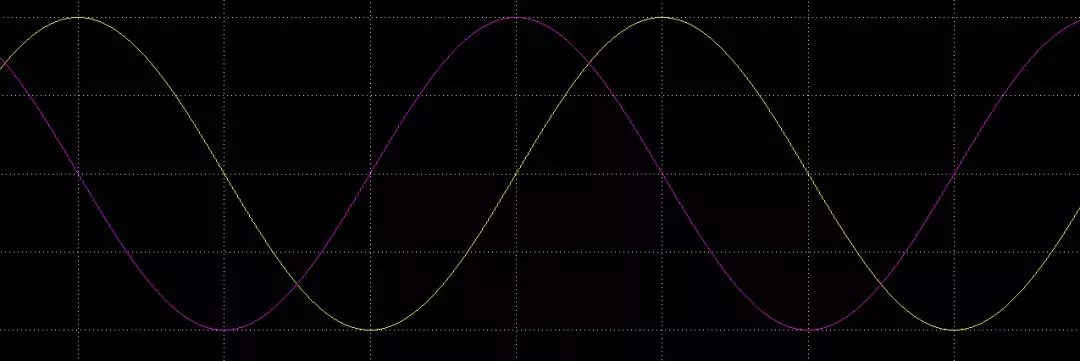
图7 abo电压矢量激励信号
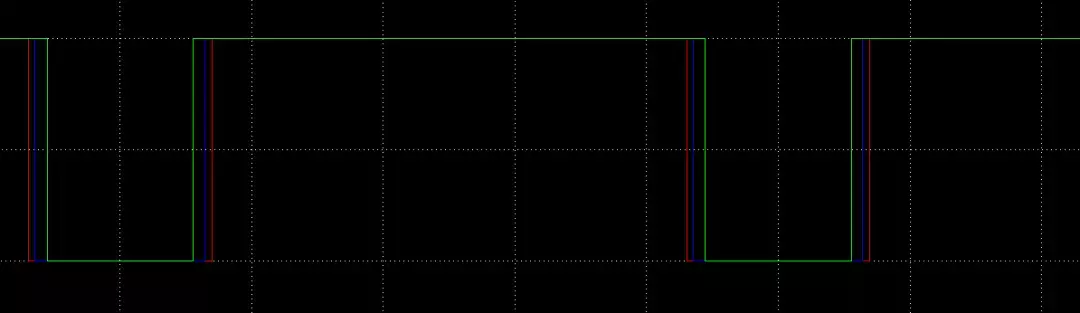
图8 PWM上桥臂输出信号
好的,我们走吧。接下来,应该构建整个开环工作电路。其中,SimpowerSystems所需的所有功能如图9所示。主要由SVPWM模型、母线电压源、通用三相逆变桥和模拟负载组成。
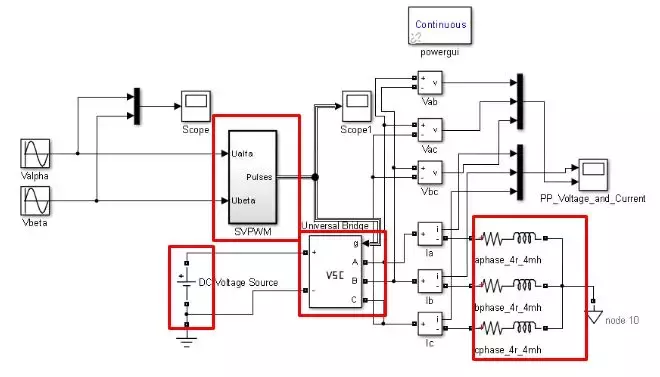
图9开环工作电路
A.将RL模拟负载的参数设置为4欧姆和4mH,并运行模拟。结果如下:
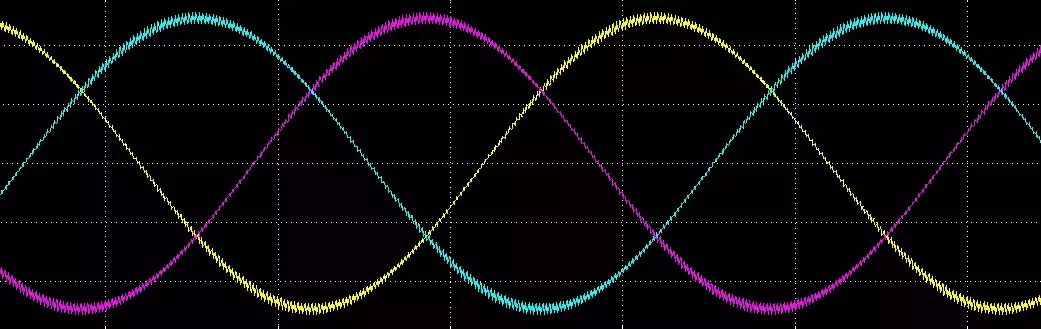
图10 abc三相输出电流(4欧姆,4mH)
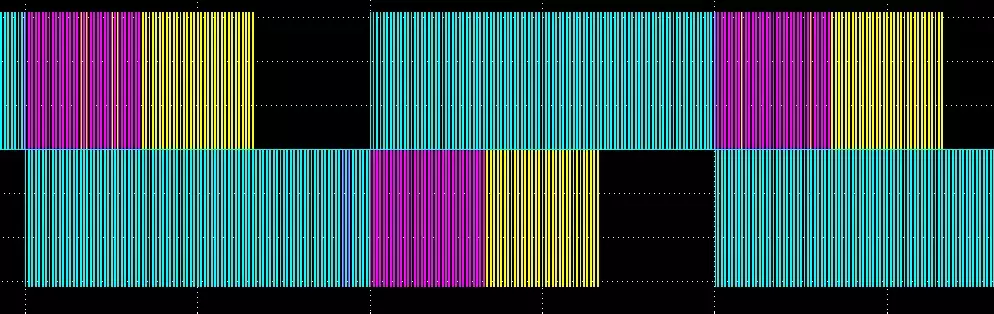
图11 VAB、Vbc和Vac (4欧姆,4mH)的输出相电压波形
B.将RL参数更改为4 ohms和0.4mH,则仿真波形如下:
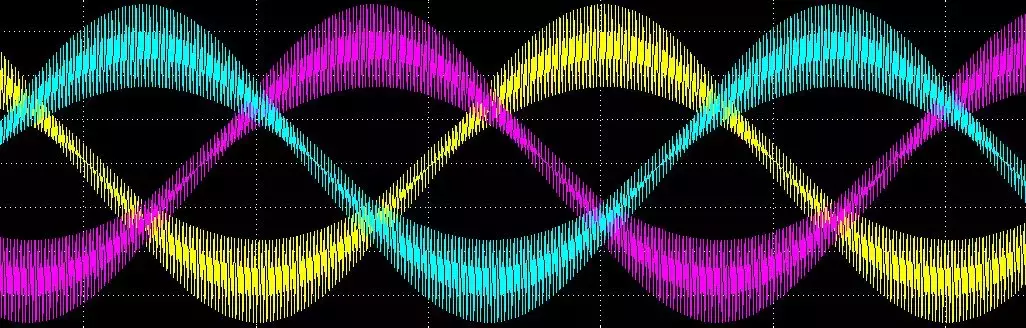
图12 abc三相输出电流(4欧姆,0.4毫安时)
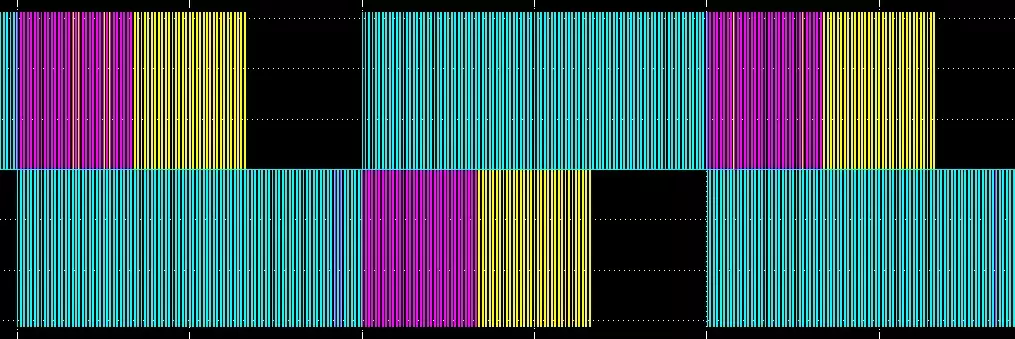
图13 VAB、Vbc和Vac (4欧姆,0.4毫伏)的输出相电压波形
c、进一步降低电感参数至0.1mH,保持电阻参数不变,则仿真波形如下:
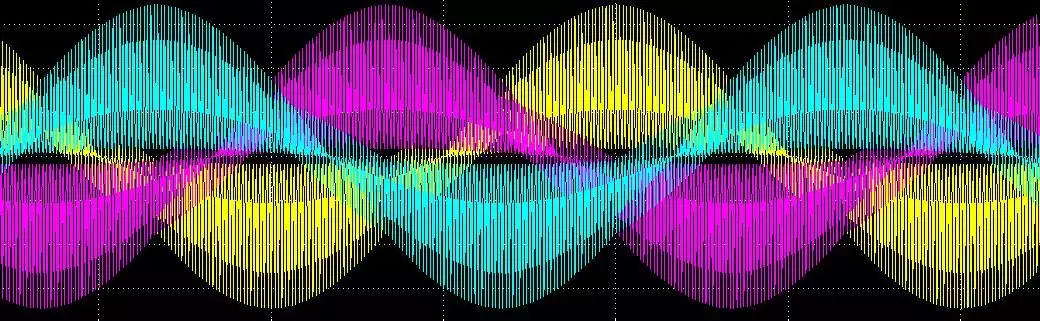
图14 abc三相输出电流(4欧姆,0.1毫安时)
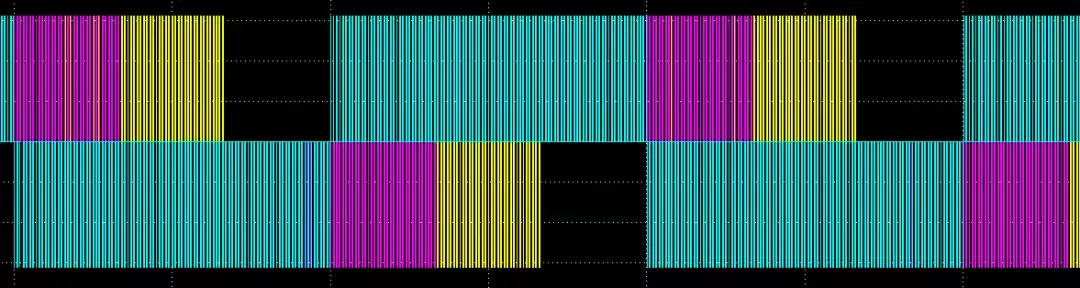
图15 VAB、Vbc和Vac (4 o)的输出相电压波形
D.某品牌驱动器的实测电流波形如下图16所示。可以看出,图14非常类似于图16。
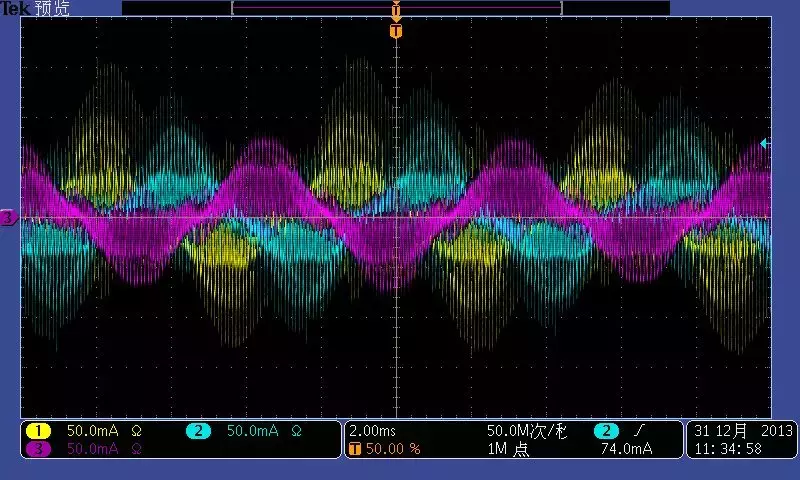
图16某品牌UVW三相输出电流波形
第二部分:闭环控制
闭环控制电路如图17所示,这是最基本的矢量控制算法。
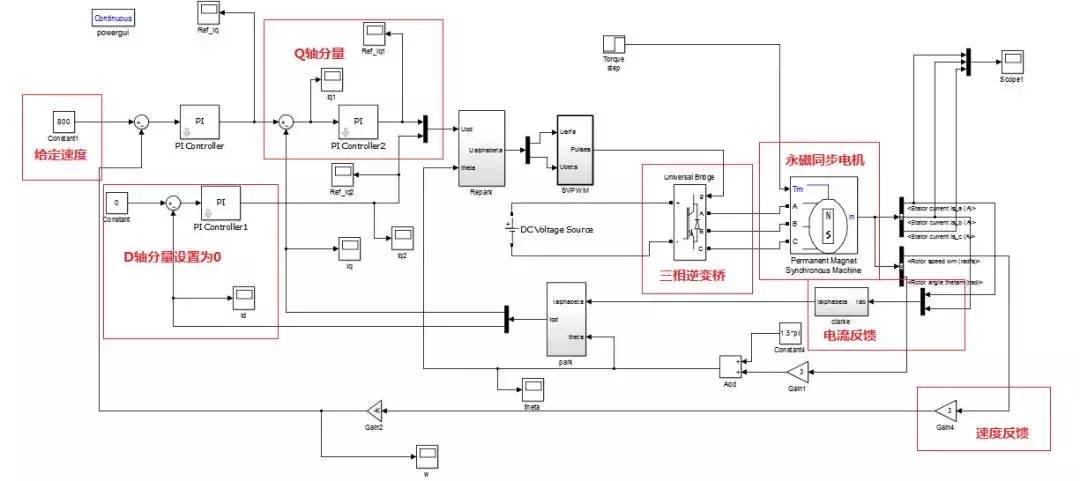
图17闭环控制电路
点击电机的启动按钮,得到电机的速度响应图,如图18所示:
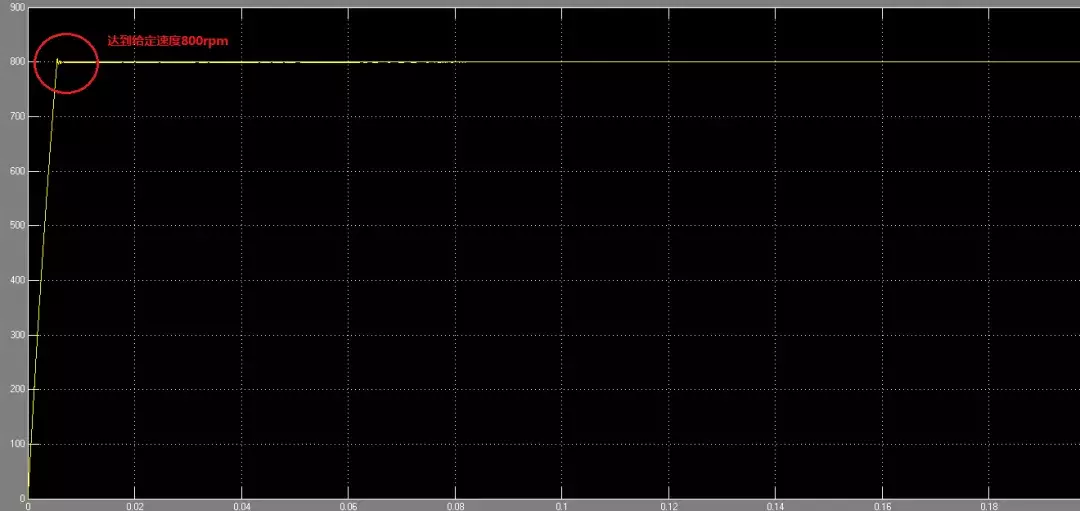
图18电机速度到达
接下来,让我们进一步放大图18,尤其是三个指标:
1、建立时间,即速度环的对应时间。
2.速度过调量
3.稳态速度波动
分别如下图19和图20所示。
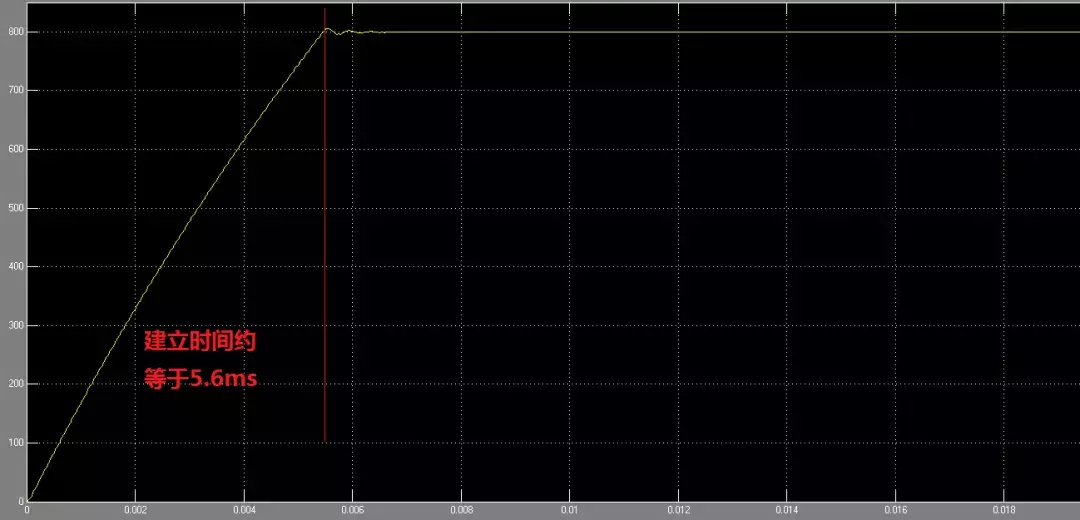
图19速度设置时间
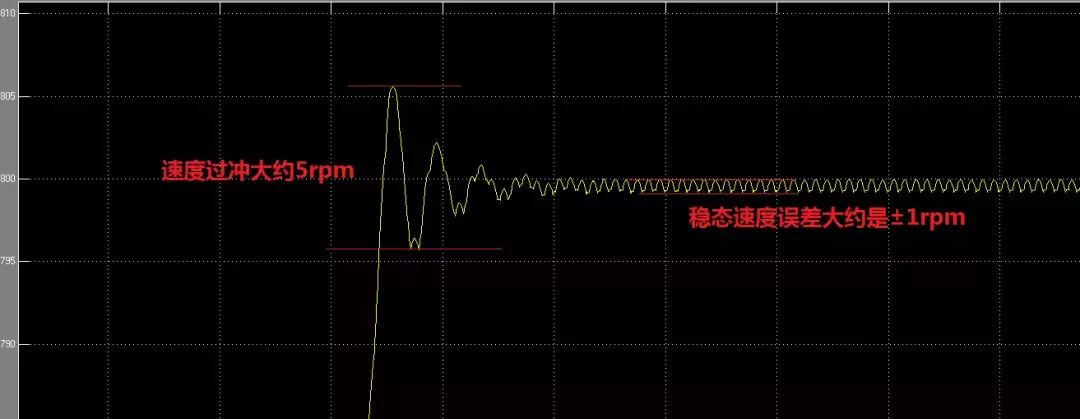
图20
